前面两天画了点和线,今天我们来画一个最简单也是最强大的面——三角形。
本文主要讲解三角形绘制算法的推导和思路(只涉及到一点点的向量知识),最后会给出代码实现,大家放心的看下去就好。
1.如何画一个三角形?
在正式开始这一小节前,我们先想一下如何利用上一节的画线算法绘制一个实心的三角形。
假设现在平面内有三个不共线的点组成一个三角形,我们可以利用上一节的直线算法轻易的连接三角形的三条边,这时候我们会生成一个空心的、封闭的三角形。
那么这时候问题就转换为,如何把这个空心的三角形变为一个实心的三角形?
我想大家这时候已经有思路了,就是一行一行地扫描像素,把两个边界点之间的像素全部涂满上色就可以了。
这个方法肯定是可以的,但是实现不是很优雅,也不是业内的主流实现方式。因为基于行扫描的算法不是本文的重点,所以详细的推导和代码实现就不提供了,感兴趣的同学可以自己尝试实现一下。
2.利用向量叉乘画三角形
开始本节前先简单复习一下向量叉乘的几何意义。
2.1 数学推导
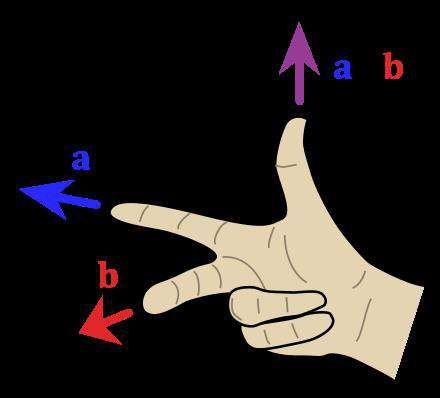
在三维空间中,两个三维向量 a 和 b 做叉乘,会得到一个和已知两个向量垂直的新向量 a×b。
既然叉乘产生的是一个新向量,那么它肯定有个方向,我们一般用右手定则来判断:将右手食指指向 a 的方向、中指指向 b 的方向,则此时拇指的方向即为 a×b 的方向。
综上所述,我们可以对向量叉乘做一个严谨的定义:
a×b=∥a∥∥b∥sin(θ) n
其中 θ 表示 a 和 b 在它们所定义的平面上的夹角(0∘≤θ≤180∘)。∥a∥ 和 ∥b∥ 是向量 a 和 b 的模长,而 n 则是一个与 a 、b 所构成的平面垂直的单位向量,方向由右手定则决定。
有上面的理论,我们就可以判断两个向量的相对位置:
- a 向量叉乘 b 向量,如果值为正,则表示 b 向量在 a 向量左侧
- a 向量叉乘 b 向量,如果值为负,则表示 b 向量在 a 向量右侧
- a 向量叉乘 b 向量,如果值为零,则表示 b 向量与 a 向量共线
会判断两条线的相对位置了,我们可以做个理论迁移,利用向量叉乘判断点和三角形的位置关系。
例如下面这里例子,对于三角形 ΔABC 来说,把三条边看作 AB、 BC、 CA 三条首尾相连的向量,平面内有一个点 P,我们通过向量叉乘来判断相对位置:
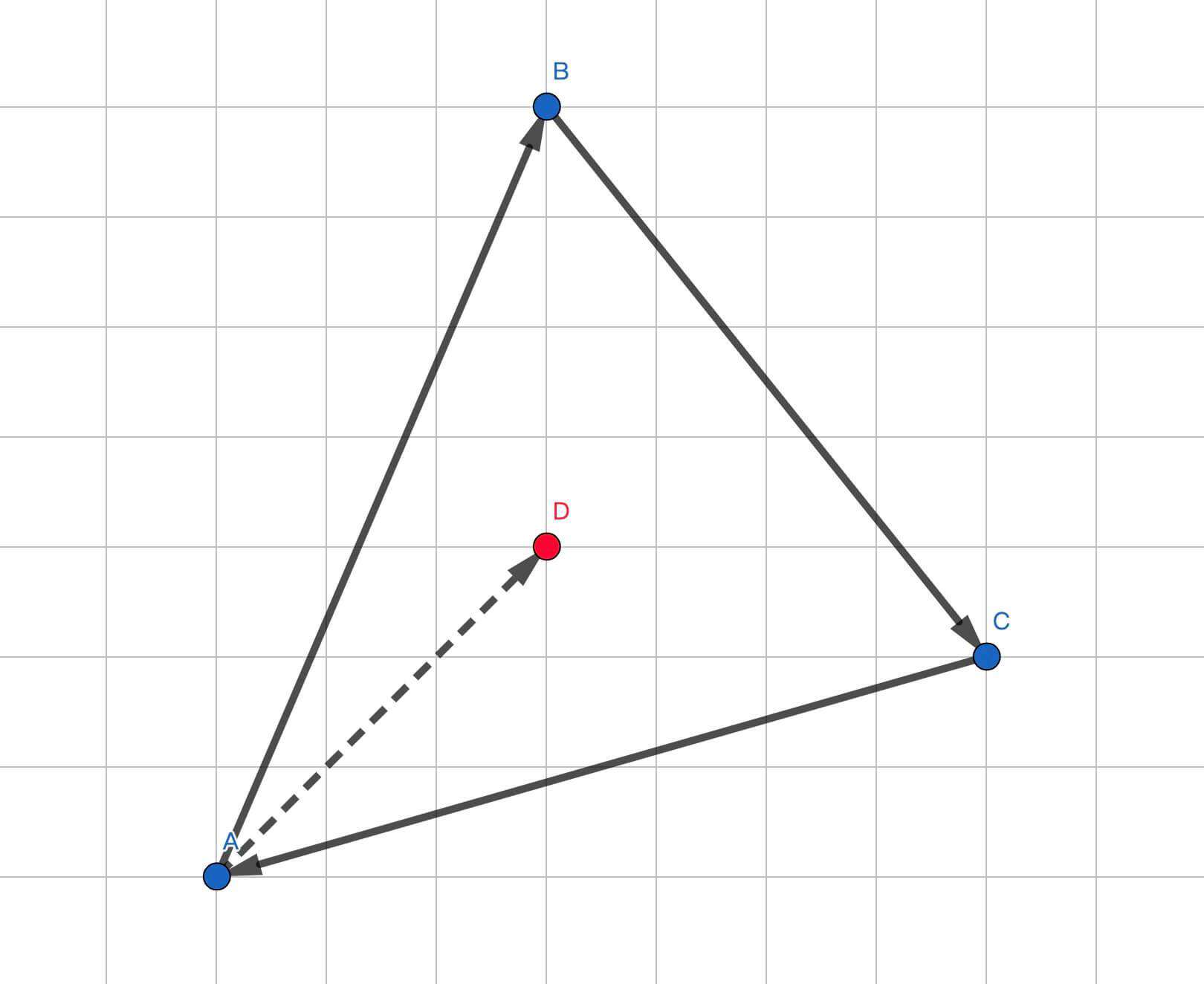
- AB×AP,值为正,故 P 在 AB 左侧
- BC×BP,值为正,故 P 在 BC 左侧
- CA×CP,值为正,故 P 在 AC 左侧
综合以上三个限制条件,我们可以判断 P 在 ΔABC 内。
如果上面三个计算中有值为负的情况,说明 P 在三角形外;如果有值为 0 的情况,说明 P 在三角形的边或顶点上。
2.2 代码实现
理论基础复习完了,我们就可以写代码了。代码实现相当简单,我们构建一个函数 crossProduct,传入三角形的三个顶点和平面上的任意一点 P,然后根据四个顶点构建出向量计算叉乘就可以了:
// 利用叉乘判断是否在三角形内部
Vec3i crossProduct(Vec2i *pts, Vec2i P) {
// 构建出三角形 ABC 三条边的向量
Vec2i AB(pts[1].x - pts[0].x, pts[1].y - pts[0].y);
Vec2i BC(pts[2].x - pts[1].x, pts[2].y - pts[1].y);
Vec2i CA(pts[0].x - pts[2].x, pts[0].y - pts[2].y);
// 三角形三个顶点和 P 链接形成的向量
Vec2i AP(P.x - pts[0].x, P.y - pts[0].y);
Vec2i BP(P.x - pts[1].x, P.y - pts[1].y);
Vec2i CP(P.x - pts[2].x, P.y - pts[2].y);
return Vec3i(AB^AP, BC^BP, CA^CP);
}
代码非常的简单,我们跑一个简单的例子验证一下:
void drawSingleTriangle() {
// 图片的宽高
int width = 200;
int height = 200;
TGAImage frame(width, height, TGAImage::RGB);
Vec2i pts[3] = {Vec2i(10, 10), Vec2i(150, 30), Vec2i(70, 160)};
Vec2i P;
// 遍历图片中的所有像素
for (P.x = 0; P.x <= width - 1; P.x++) {
for (P.y = 0; P.y <= height - 1; P.y++) {
Vec3i bc_screen = crossProduct(pts, P);
// bc_screen 某个分量小于 0 则表示此点在三角形外(认为边也是三角形的一部分)
if (bc_screen.x<0 || bc_screen.y<0 || bc_screen.z<0) {
continue;
}
image.set(P.x, P.y, color);
}
}
frame.flip_vertically();
frame.write_tga_file("output/day03_cross_product_triangle.tga");
}
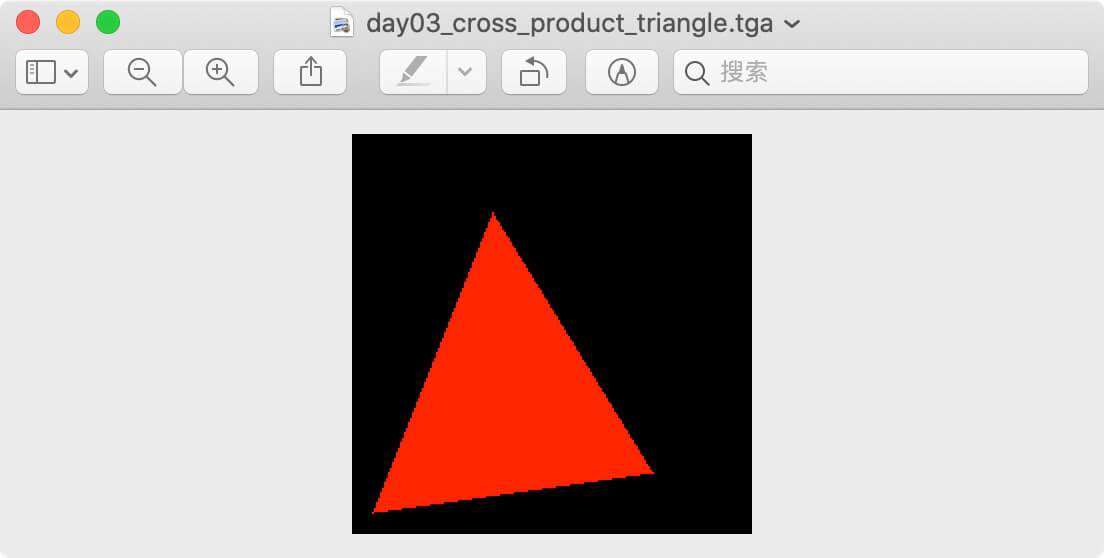
看输出图像,我们已经成功绘制了一个三角形:
3.利用三角形重心坐标画三角形
本小节介绍一个更通用的定理——重心坐标(Barycentric Coordinate)。其实重心坐标用来画三角形还是有些大材小用了,他最重要的运用其实是用来做插值,不过插值的具体运用我们后续章节再探讨,今天我们看看重心坐标的推导和代码实现。
3.1 数学推导
我们暂时只考虑二维平面的三角形。对于一个三角形 ΔABC 来说,假设平面内有一个点 P,很显然,AP,AB,AC 向量都是线性相关的,也就是说,可以用下式表示 AP:
AP=uAB+vAC
我们把这个三角形放在一个笛卡尔坐标系下,我们就可以这样表示:
A−P=u(A−B)+v(A−C)
把位置挪一下,合并同类项后,P 点的位置可以表示为下式:
P=(1−u−v)A+uB+vC
结合几何意义,我们很容易推出:
- 当 (1−u−v)、u 和 v 均大于 0 小于 1 时,P 位于三角形内部
- 有一个分量等于 0 时,P 在三角形边上
- 有两个变量等于 0 时,P 在某个顶点上
再对第一个式子做一下变形,可以得到下式:
uAB+vAC+PA=0
因为三角形位于笛卡尔坐标系内,我们可以把上面的式子沿 x 和 y 轴拆分为两个式子,他们和上式是等价的:
{uABx+vACx+PAx=0uABy+vACy+PAy=0
观察这个式子,我们可以转换为矩阵乘法的形式:
[uv1]⎣⎢⎢⎢⎡ABxACxPAx⎦⎥⎥⎥⎤=0
[uv1]⎣⎢⎢⎢⎡AByACyPAy⎦⎥⎥⎥⎤=0
观察上面的式子,我们要寻找一个向量 [uv1],它要与向量 [ABx ACx PAx] 和 [ABy ACy PAy] 同时点乘为 0。
稍微思考一下,这不就意味着向量 [uv1] 同时垂直于向量 [ABx ACx PAx] 和 [ABy ACy PAy] 吗!
所以我们直接求后两个向量的叉乘就可以求出向量 [uv1] 了。
后两个向量做叉乘的时候有个小细节需要注意一下,向量叉乘的直接结果(先假设结果为 [efg] )一般只是和 [uv1] 平行,想要正确求出 u 和 v 的值,我们需要对向量 [efg] 除以 g,也就是说 u=e/g,v=f/g,1=g/g。
这个时候问题就来了,上面的除法成立,必须要建立在 g 不为 0 的基础上,那么我们就要研究一下 g 为 0 的数学含义了。
根据向量的叉乘公式:
u×v=∣∣∣∣∣u2v2u3v3∣∣∣∣∣i−∣∣∣∣∣u1v1u3v3∣∣∣∣∣j+∣∣∣∣∣u1v1u2v2∣∣∣∣∣k
g 向量可以表示为这样的行列式:
∣∣∣∣∣∣ABxAByACxACy∣∣∣∣∣∣
如果这时候的叉乘结果为 0,把这个行列式从列向量的视角看,就相当于 AB 和 AC 向量叉乘结果为 0,也就是说 AB 和 AC 向量共线。这时候三角形 ΔABC 就退化为一条线段。
对于我们现在应用场景来说,只要检测到 g 为 0,就意味着这个三角形退化为一条线段了,我们直接舍弃掉它就好了,对最后的结果也没有影响。
3.2 代码实现
根据上面的公式推导,我们可以直接写出基于三角形重心坐标的绘制算法,思路理清了,代码实现就非常的简单:
// 利用重心坐标判断点是否在三角形内部
Vec3f barycentric(Vec2i *pts, Vec2i P) {
Vec3i x(pts[1].x - pts[0].x, pts[2].x - pts[0].x, pts[0].x - P.x);
Vec3i y(pts[1].y - pts[0].y, pts[2].y - pts[0].y, pts[0].y - P.y);
// u 向量和 x y 向量的点积为 0,所以 x y 向量叉乘可以得到 u 向量
Vec3i u = x^y;
// 由于 A, B, C, P 的坐标都是 int 类型,所以 u.z 必定是 int 类型,取值范围为 ..., -2, -1, 0, 1, 2, ...
// 所以 u.z 绝对值小于 1 意味着三角形退化了,直接舍弃
if(std::abs(u.z) < 1) {
return Vec3f(-1, 1, 1);
}
return Vec3f(1.f- (u.x+u.y) / (float)u.z, u.x / (float)u.z, u.y / (float)u.z);
}
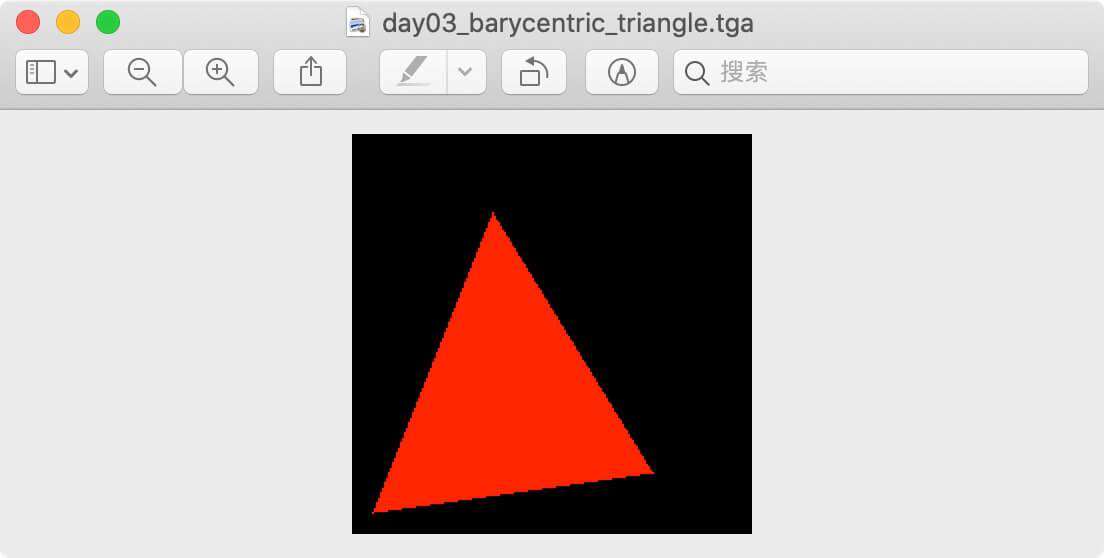
用上面的算法画个三角形验证一下,很完美:
4.绘制模型
算法写好了,我们就要投入到实际应用中了,昨天里我们画了个三维模型的线框图,今天我们就个这个模型上色。
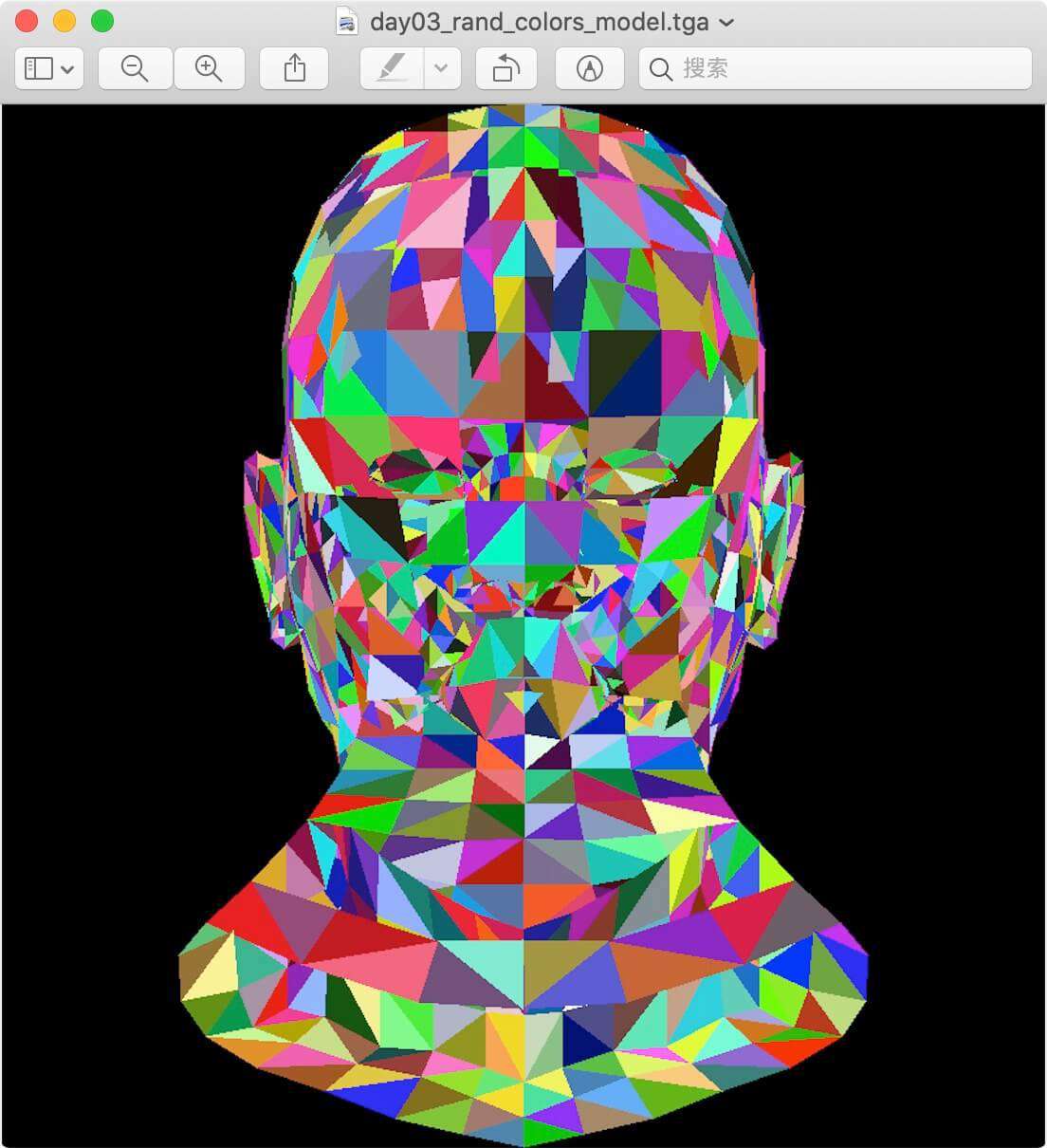
4.1 随机着色
为了区分每个三角形,我们随机给三角形上不同的色:
triangle(screen_coords, frame, TGAColor(rand() % 255, rand() % 255, rand() % 255, 255));
这里还有个关于性能的小细节。这次我们绘制的图像大小为 800*800,如果按照之前的算法,每次画三角形,都要把所有像素遍历一遍,这个模型大概有 2000 个三角形,那就是要循环 2000*800*800 即 12.8 亿 次!
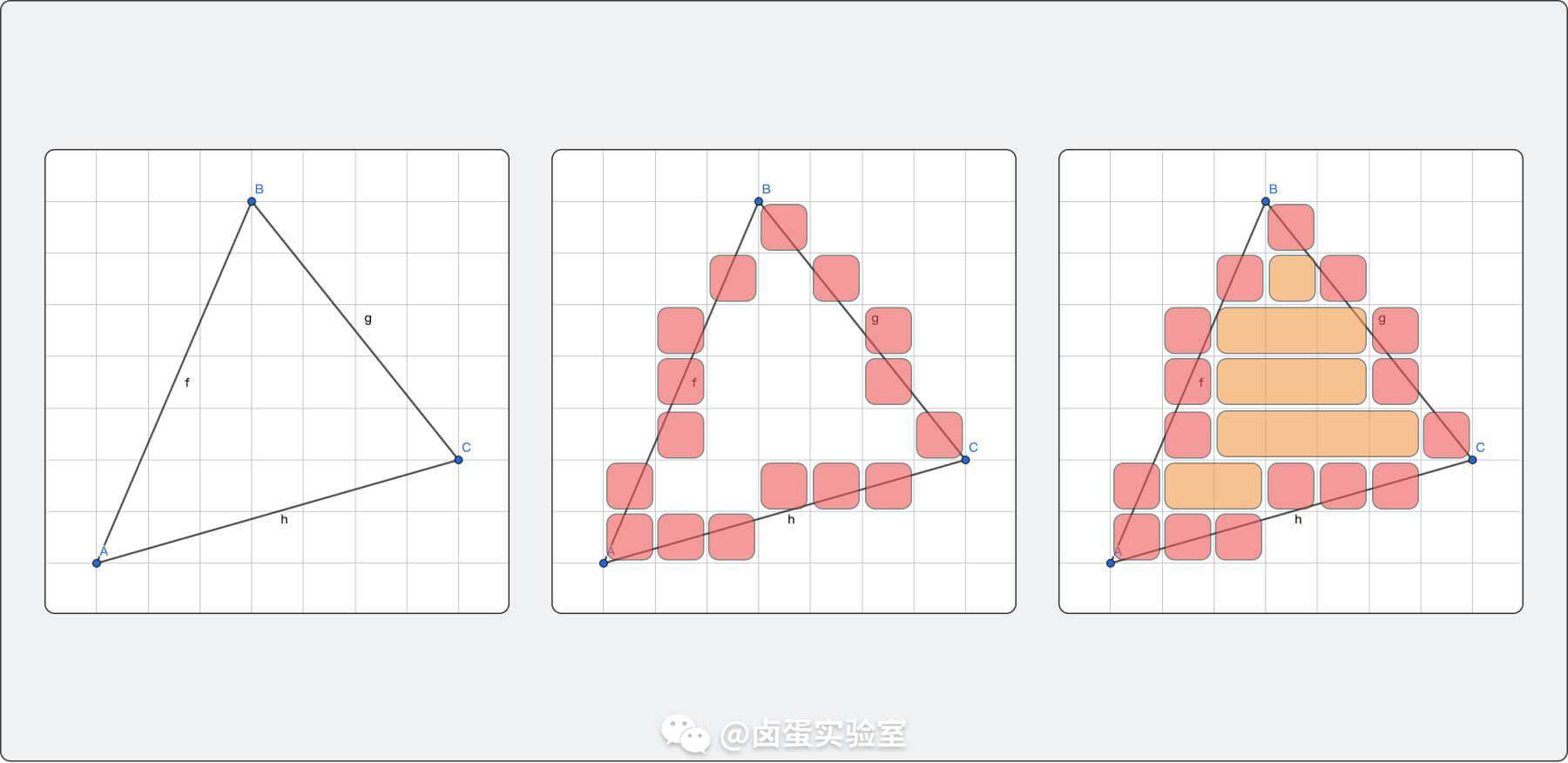
这个量级是很恐怖的,其中很多的运算都是不必要的,比如说下图,我们其实只要循环由三个顶点计算出的红色包围盒里的像素就可以了,不需要计算图片内的所有像素:
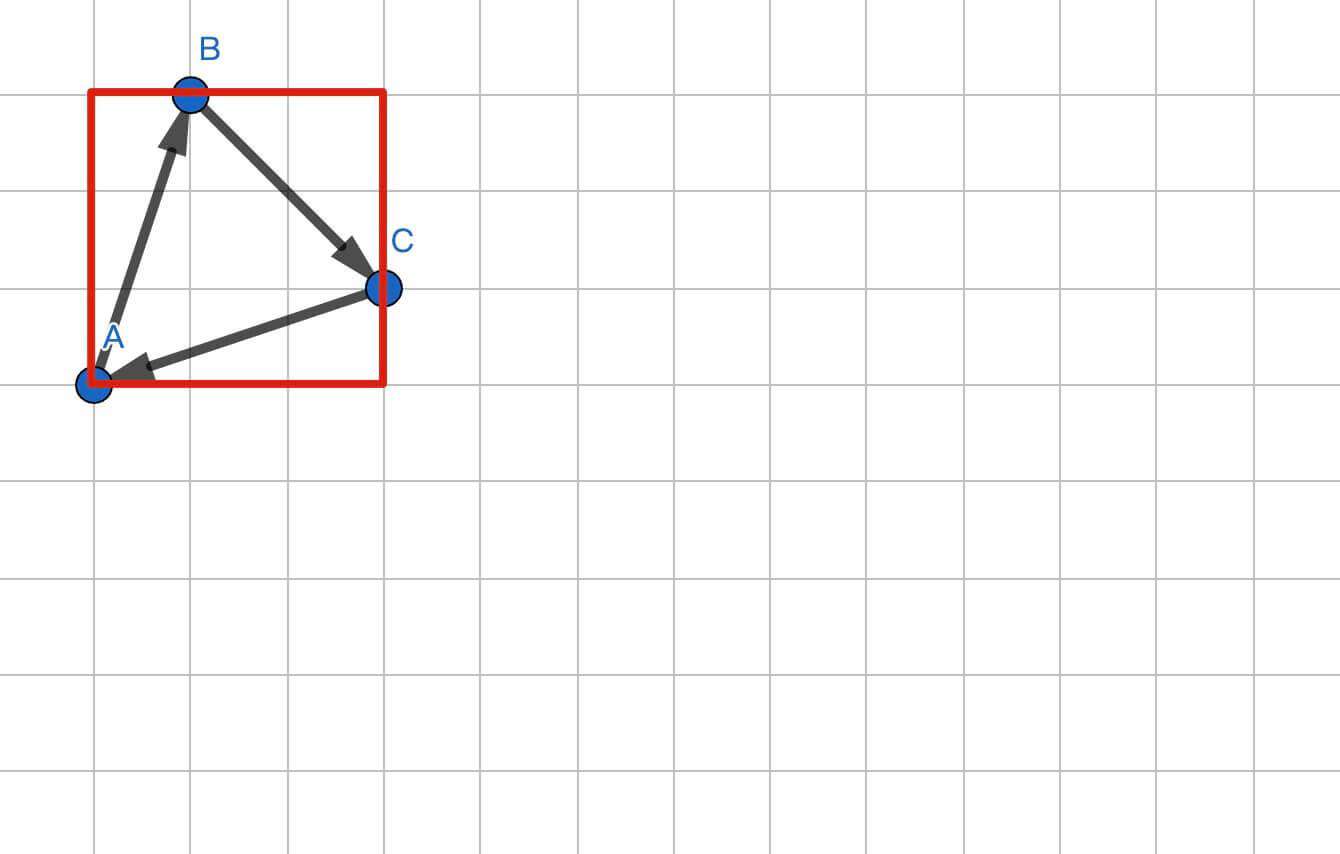
所以我们要在遍历像素前加先求一遍三角形包围盒的边界,正式画三角形时只要遍历包围盒内的像素就可以了:
// 定义包围盒
Vec2i boxmin(image.get_width() - 1, image.get_height() - 1);
Vec2i boxmax(0, 0);
// 图片的边界
Vec2i clamp(image.get_width() - 1, image.get_height() - 1);
// 查找包围盒边界
for (int i = 0; i < 3; i++) {
// 第一层循环,遍历三角形的三个顶点
for (int j = 0; j < 2; j++) {
// 第二层循环,根据顶点数值缩小包围盒的范围
boxmin.x = std::max(0, std::min(boxmin.x, pts[i].x));
boxmin.y = std::max(0, std::min(boxmin.y, pts[i].y));
boxmax.x = std::min(clamp.x, std::max(boxmax.x, pts[i].x));
boxmax.y = std::min(clamp.y, std::max(boxmax.y, pts[i].y));
}
}
最后我们绘制出的结果就是这样的,看着还是有些酷炫的:
4.2 简单的光照着色
随机着色的好处是可以很清楚的表现出模型各个三角形的轮廓,但是也失去了模型的辨识度,很多细节都丢失了。
我们在这里引入一个非常简单的光照模型,认为单位面积上接收到的光,和平面法线与光照方向的余弦值成正比:
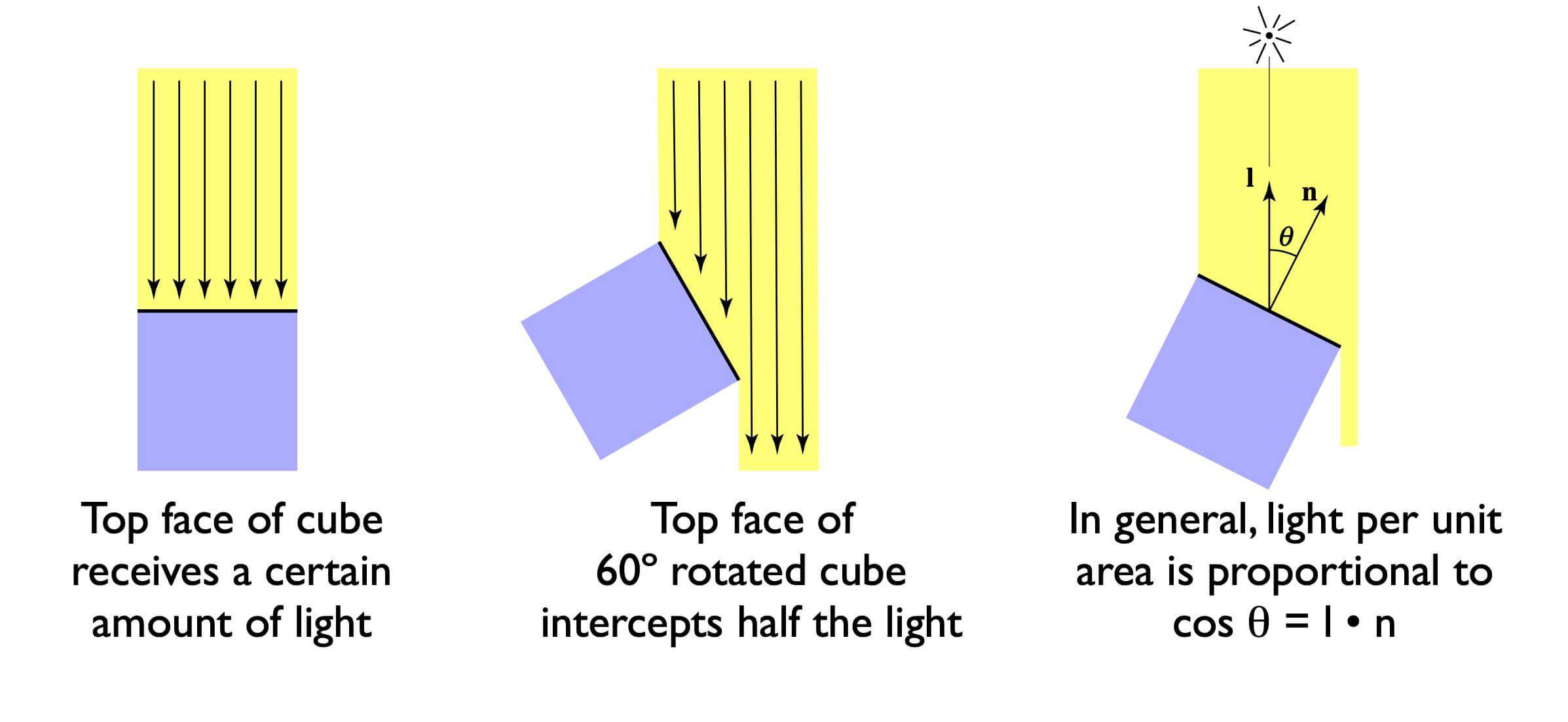
所以着色的思路就很清晰了:
- 我们要先定义一个三维空间里的光照方向(向量),然后计算三维空间里各个三角形的法线(向量)
- 两个向量归一化后,然后计算这两个向量的点乘,会得到一个值
- 这个值小于 0,说明光在三角形的另一侧,从物理上看是照射不到三角形表面的,所以直接舍弃此三角形
- 这个值大于 0,值越大,说明单位面积上接收到的光越多,三角形越亮
把上面的思路翻译成代码就是这样的:
// 这个是用一个模拟光照对三角形进行着色
Vec3f light_dir(0, 0, -1); // 假设光是垂直屏幕的
for (int i = 0; i < model->nfaces(); i++) {
std::vector<int> face = model->face(i);
Vec2i screen_coords[3];
Vec3f world_coords[3];
// 计算世界坐标和屏幕坐标
for (int j = 0; j < 3; j++) {
Vec3f v = model->vert(face[j]);
// 投影为正交投影,而且只做了个简单的视口变换
screen_coords[j] = Vec2i((v.x + 1.) * width / 2., (v.y + 1.) * height / 2.);
world_coords[j] = v;
}
// 计算世界坐标中某个三角形的法线(法线 = 三角形任意两条边做叉乘)
Vec3f n = (world_coords[2] - world_coords[0]) ^ (world_coords[1] - world_coords[0]);
n.normalize(); // 对 n 做归一化处理
// 三角形法线和光照方向做点乘,点乘值大于 0,说明法线方向和光照方向在同一侧
// 值越大,说明越多的光照射到三角形上,颜色越白
float intensity = n * light_dir;
if (intensity > 0) {
triangle(screen_coords, frame, TGAColor(intensity * 255, intensity * 255, intensity * 255, 255));
}
}
最后生成的图片就是这样的:
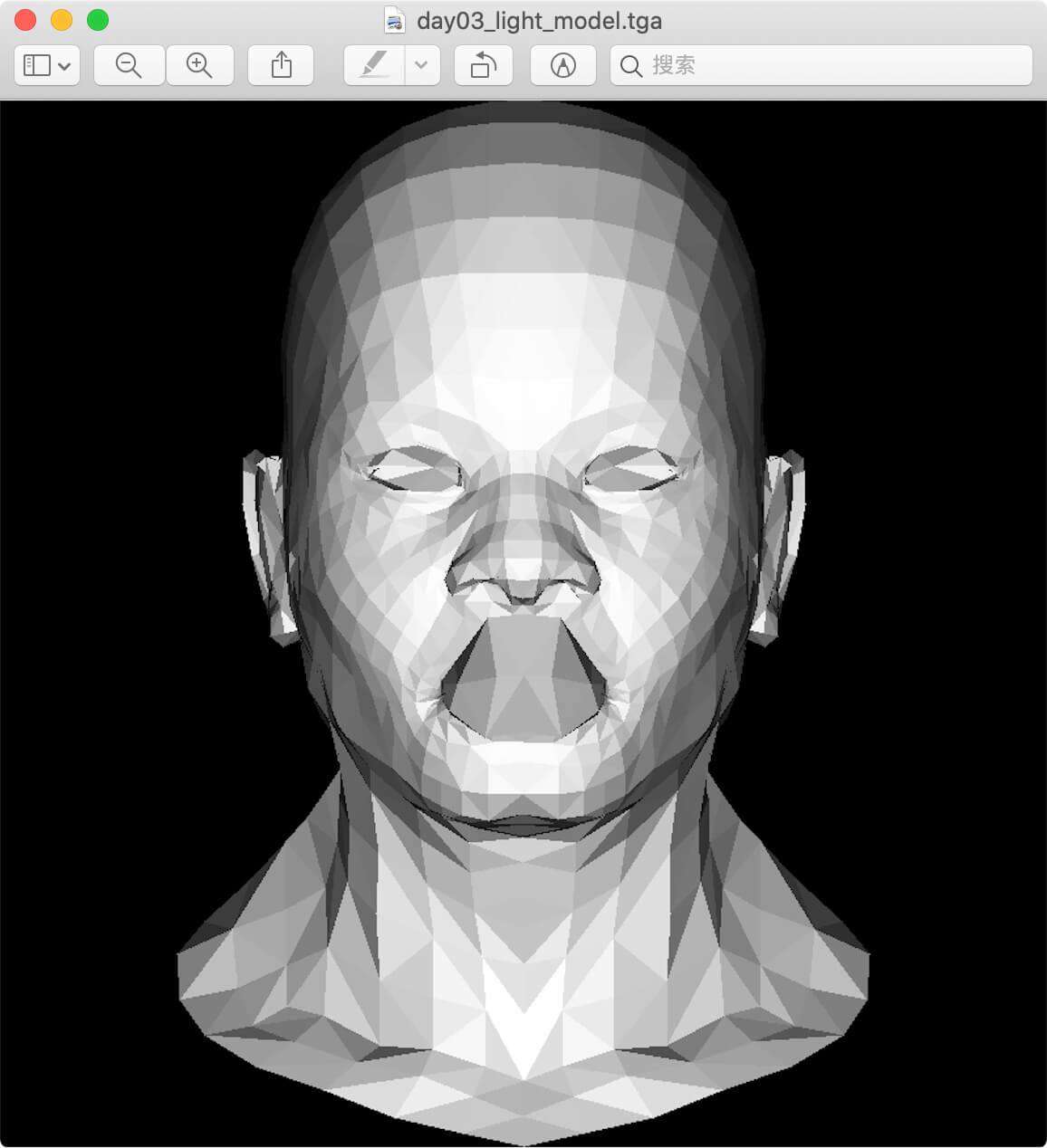
到这里渲染出的图像就有些人样了,但是大家应该也发现了,上图的嘴巴和眼睛处看上去怪怪的。这里的确是有问题,因为它把背后的三角形渲染出来了,要想解决这个问题,就要引入一个新的概念——z-buffer。
推荐直接阅读原文,更新更及时,阅读体验更佳
欢迎大家关注我的微信公众号:卤蛋实验室,目前专注前端技术,对图形学也有一些微小研究。
常见问题FAQ
- 免费下载或者VIP会员专享资源能否直接商用?
- 本站所有资源版权均属于原作者所有,这里所提供资源均只能用于参考学习用,请勿直接商用。若由于商用引起版权纠纷,一切责任均由使用者承担。更多说明请参考 VIP介绍。
- 提示下载完但解压或打开不了?
- 找不到素材资源介绍文章里的示例图片?
- 模板不会安装或需要功能定制以及二次开发?





发表评论
还没有评论,快来抢沙发吧!